រង្វិលជុំបិទម៉ូទ័រស្តេបភើរបានផ្លាស់ប្តូរសមាមាត្រនៃដំណើរការទៅនឹងថ្លៃដើមនៅក្នុងកម្មវិធីគ្រប់គ្រងចលនាជាច្រើន។ ភាពជោគជ័យនៃម៉ូទ័រវឌ្ឍនភាពរង្វិលជុំបិទជិត VIC ក៏បានបើកលទ្ធភាពនៃការជំនួសម៉ូទ័រ servo ថ្លៃៗជាមួយនឹងម៉ូទ័រដែលមានតម្លៃទាបផងដែរ។ម៉ូទ័រស្តេបភើរនៅក្នុងចំនួនកម្មវិធីស្វ័យប្រវត្តិកម្មឧស្សាហកម្មដែលមានស្តង់ដារខ្ពស់កាន់តែច្រើនឡើងៗ ការរីកចម្រើនផ្នែកបច្ចេកវិទ្យាកំពុងផ្លាស់ប្តូរសមាមាត្រនៃការអនុវត្តទៅនឹងថ្លៃដើមរវាងម៉ូទ័រ stepper និងម៉ូទ័រ servo។
ម៉ូទ័រ Stepper ទល់នឹងម៉ូទ័រ Servo
យោងតាមប្រាជ្ញាធម្មតា ប្រព័ន្ធគ្រប់គ្រងស៊ែរវ៉ូដំណើរការបានល្អជាងក្នុងកម្មវិធីដែលត្រូវការល្បឿនលើសពី 800 RPM និងការឆ្លើយតបថាមវន្តខ្ពស់។ ម៉ូទ័រស្តេបភើរគឺស័ក្តិសមជាងសម្រាប់កម្មវិធីដែលមានល្បឿនទាប ការបង្កើនល្បឿនទាបទៅមធ្យម និងកម្លាំងបង្វិលជុំកាន់ខ្ពស់។
ដូច្នេះតើអ្វីជាមូលដ្ឋានសម្រាប់ប្រាជ្ញាធម្មតានេះអំពីម៉ូទ័រ stepper និងម៉ូទ័រ servo? ចូរយើងវិភាគវាឱ្យកាន់តែលម្អិតខាងក្រោម។
១. ភាពសាមញ្ញ និងថ្លៃដើម
ម៉ូទ័រ Stepper មិនត្រឹមតែមានតម្លៃថោកជាងម៉ូទ័រ servo ប៉ុណ្ណោះទេ ពួកវាក៏ងាយស្រួលក្នុងការដាក់ឱ្យដំណើរការ និងថែទាំផងដែរ។ ម៉ូទ័រ Stepper មានស្ថេរភាពនៅពេលឈប់ និងរក្សាទីតាំងរបស់វា (សូម្បីតែជាមួយនឹងបន្ទុកថាមវន្តក៏ដោយ)។ ទោះជាយ៉ាងណាក៏ដោយ ប្រសិនបើតម្រូវឱ្យមានដំណើរការខ្ពស់ជាងសម្រាប់កម្មវិធីមួយចំនួន ម៉ូទ័រ servo ដែលមានតម្លៃថ្លៃ និងស្មុគស្មាញជាងត្រូវតែប្រើ។
២. រចនាសម្ព័ន្ធ
ម៉ូទ័រស្តេបភើរបង្វិលជាជំហានៗ ដោយប្រើឧបករណ៍រំញ័រម៉ាញ៉េទិច ដើម្បីទាញមេដែកបន្តិចម្តងៗពីទីតាំងមួយទៅទីតាំងមួយទៀត។ ដើម្បីផ្លាស់ទីម៉ូទ័រ 100 ទីតាំងក្នុងទិសដៅណាមួយ សៀគ្វីនេះតម្រូវឱ្យមានប្រតិបត្តិការជំហានចំនួន 100 ដែលត្រូវអនុវត្តលើម៉ូទ័រ។ ម៉ូទ័រស្តេបភើរប្រើជីពចរដើម្បីសម្រេចបាននូវចលនាបន្ថែម ដែលអនុញ្ញាតឱ្យមានទីតាំងច្បាស់លាស់ដោយមិនចាំបាច់ប្រើឧបករណ៍ចាប់សញ្ញាមតិត្រឡប់ណាមួយ។
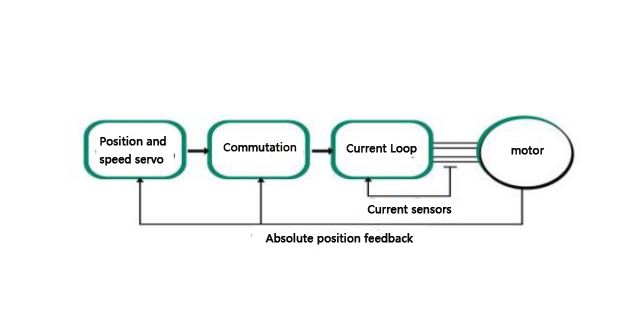
វិធីសាស្ត្រនៃចលនារបស់ម៉ូទ័រស៊ែរវ៉ូគឺខុសគ្នា។ វាភ្ជាប់ឧបករណ៍ចាប់សញ្ញាទីតាំង - ពោលគឺឧបករណ៍អ៊ិនកូដឌ័រ - ទៅនឹងរ៉ូទ័រម៉ាញេទិក ហើយរកឃើញទីតាំងពិតប្រាកដរបស់ម៉ូទ័រជាបន្តបន្ទាប់។ ស៊ែរវ៉ូត្រួតពិនិត្យភាពខុសគ្នារវាងទីតាំងជាក់ស្តែងរបស់ម៉ូទ័រ និងទីតាំងដែលបានបញ្ជា ហើយកែតម្រូវចរន្តទៅតាមនោះ។ ប្រព័ន្ធរង្វិលជុំបិទជិតនេះរក្សាម៉ូទ័រឱ្យស្ថិតក្នុងស្ថានភាពចលនាត្រឹមត្រូវ។

៣. ល្បឿន និងកម្លាំងបង្វិលជុំ
ភាពខុសគ្នានៃដំណើរការរវាងម៉ូទ័រ stepper និង servo កើតចេញពីដំណោះស្រាយរចនាម៉ូទ័រផ្សេងៗគ្នារបស់ពួកគេ។ម៉ូទ័រស្តេបភើរមានចំនួនប៉ូលច្រើនជាងម៉ូទ័រ servo ដូច្នេះការបង្វិលពេញលេញនៃម៉ូទ័រ stepper តម្រូវឱ្យមានការផ្លាស់ប្តូរចរន្តខ្យល់ច្រើនជាងមុន ដែលបណ្តាលឱ្យមានការធ្លាក់ចុះយ៉ាងឆាប់រហ័សនៃកម្លាំងបង្វិលជុំនៅពេលបង្កើនល្បឿន។ លើសពីនេះ ប្រសិនបើកម្លាំងបង្វិលជុំអតិបរមាត្រូវបានឈានដល់ ម៉ូទ័រ stepper អាចបាត់បង់មុខងារធ្វើសមកាលកម្មល្បឿនរបស់វា។ សម្រាប់ហេតុផលទាំងនេះ ម៉ូទ័រ servo គឺជាដំណោះស្រាយដែលពេញចិត្តនៅក្នុងកម្មវិធីល្បឿនលឿនភាគច្រើន។ ផ្ទុយទៅវិញ ចំនួនប៉ូលខ្ពស់នៃម៉ូទ័រ stepper មានអត្ថប្រយោជន៍នៅល្បឿនទាប នៅពេលដែលម៉ូទ័រ stepper មានគុណសម្បត្តិកម្លាំងបង្វិលជុំជាងម៉ូទ័រ servo ដែលមានទំហំដូចគ្នា។
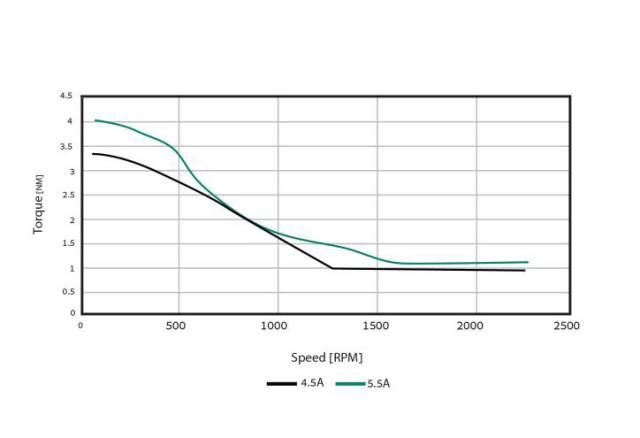
នៅពេលដែលល្បឿនកើនឡើង កម្លាំងបង្វិលជុំរបស់ម៉ូទ័រ stepper ថយចុះ
៤. ការកំណត់ទីតាំង
មានភាពខុសគ្នាសំខាន់ៗរវាងម៉ូទ័រ stepper និងម៉ូទ័រ servo នៅក្នុងកម្មវិធីដែលទីតាំងពិតប្រាកដរបស់ម៉ាស៊ីនត្រូវដឹងគ្រប់ពេលវេលា។ នៅក្នុងកម្មវិធីចលនារង្វិលជុំបើកចំហដែលគ្រប់គ្រងដោយម៉ូទ័រ stepper ប្រព័ន្ធត្រួតពិនិត្យសន្មតថាម៉ូទ័រតែងតែស្ថិតក្នុងស្ថានភាពចលនាត្រឹមត្រូវ។ ទោះជាយ៉ាងណាក៏ដោយ បន្ទាប់ពីមានបញ្ហាមួយត្រូវបានជួបប្រទះ ដូចជាម៉ូទ័រជាប់គាំងដោយសារតែសមាសធាតុជាប់គាំង ឧបករណ៍បញ្ជាមិនអាចដឹងពីទីតាំងពិតប្រាកដរបស់ម៉ាស៊ីនបានទេ ដែលអាចនាំឱ្យបាត់បង់ទីតាំង។ ប្រព័ន្ធរង្វិលជុំបិទជិតរបស់ម៉ូទ័រ servo ខ្លួនវាមានគុណសម្បត្តិមួយ៖ ប្រសិនបើវាត្រូវបានជាប់គាំងដោយវត្ថុណាមួយ វានឹងរកឃើញវាភ្លាមៗ។ ម៉ាស៊ីននឹងឈប់ដំណើរការ ហើយនឹងមិនដែលចេញពីទីតាំងឡើយ។
៥. ការប្រើប្រាស់កំដៅ និងថាមពល
ម៉ូទ័រស្តេបភើររង្វិលបើកប្រើចរន្តថេរ និងបញ្ចេញកំដៅច្រើន។ ការគ្រប់គ្រងរង្វិលបិទផ្តល់តែចរន្តដែលត្រូវការសម្រាប់រង្វិលល្បឿនប៉ុណ្ណោះ ដូច្នេះហើយជៀសវាងបញ្ហានៃការឡើងកំដៅម៉ូទ័រ។
សេចក្តីសង្ខេបនៃការប្រៀបធៀប
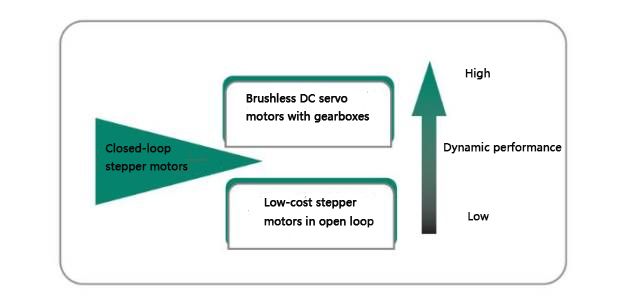
ប្រព័ន្ធគ្រប់គ្រង servo គឺស័ក្តិសមបំផុតសម្រាប់កម្មវិធីល្បឿនលឿនដែលពាក់ព័ន្ធនឹងការផ្លាស់ប្តូរបន្ទុកថាមវន្ត ដូចជាដៃមនុស្សយន្តជាដើម។ ម្យ៉ាងវិញទៀត ប្រព័ន្ធគ្រប់គ្រង stepper គឺស័ក្តិសមជាងសម្រាប់កម្មវិធីដែលត្រូវការការបង្កើនល្បឿនទាបទៅមធ្យម និងកម្លាំងបង្វិលជុំកាន់ខ្ពស់ ដូចជាម៉ាស៊ីនបោះពុម្ព 3D ឧបករណ៍បញ្ជូន អ័ក្សរងជាដើម។ ដោយសារតែម៉ូទ័រ stepper មានតម្លៃថោកជាង ពួកវាអាចកាត់បន្ថយថ្លៃដើមនៃប្រព័ន្ធស្វ័យប្រវត្តិកម្មនៅពេលប្រើប្រាស់។ ប្រព័ន្ធគ្រប់គ្រងចលនាដែលត្រូវការទាញយកអត្ថប្រយោជន៍ពីលក្ខណៈនៃម៉ូទ័រ servo នឹងត្រូវបញ្ជាក់ថាម៉ូទ័រដែលមានតម្លៃខ្ពស់ទាំងនេះមានតម្លៃជាមាស។
ម៉ូទ័រ stepper ជាមួយនឹងការគ្រប់គ្រងរង្វិលជុំបិទជិត
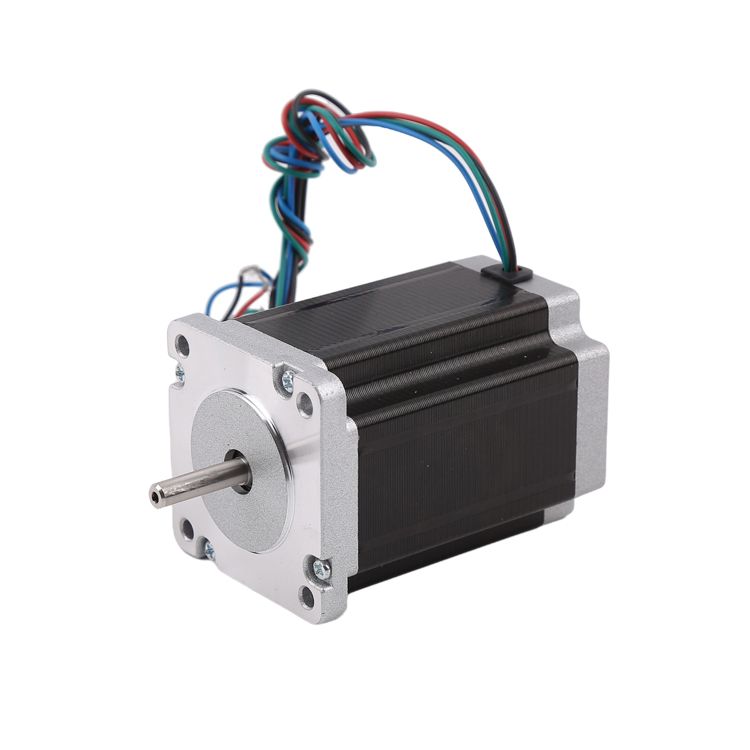
ម៉ូទ័រស្តេបភើរដែលមានការគ្រប់គ្រងអេឡិចត្រូនិករួមបញ្ចូលគ្នាគឺសមមូលនឹងម៉ូទ័រ DC ឥតជក់ពីរហ្វាស ហើយអាចអនុវត្តការគ្រប់គ្រងទីតាំង ការគ្រប់គ្រងល្បឿន ការគ្រប់គ្រង DQ និងក្បួនដោះស្រាយផ្សេងៗ។ អ៊ិនកូដឌ័រដាច់ខាតតែមួយវេនត្រូវបានប្រើសម្រាប់ការប្តូររង្វិលជុំបិទ ដោយហេតុនេះធានាបាននូវកម្លាំងបង្វិលជុំល្អបំផុតនៅល្បឿនណាមួយ។
ការប្រើប្រាស់ថាមពលទាប និងរក្សាភាពត្រជាក់
ម៉ូទ័រស្តេបភើរ VIC មានប្រសិទ្ធភាពថាមពលខ្ពស់។ មិនដូចម៉ូទ័រស្តេបភើររង្វិលជុំបើកចំហ ដែលតែងតែដំណើរការលើពាក្យបញ្ជាចរន្តពេញ និងបង្កបញ្ហាកំដៅ និងសំឡេងរំខាន ចរន្តផ្លាស់ប្តូរទៅតាមលក្ខខណ្ឌជាក់ស្តែងនៃចលនា ឧទាហរណ៍ក្នុងអំឡុងពេលបង្កើនល្បឿន និងបន្ថយល្បឿន។ ស្រដៀងគ្នាទៅនឹងសឺវ៉ូស ចរន្តដែលប្រើប្រាស់ដោយម៉ូទ័រស្តេបភើរទាំងនេះនៅពេលណាមួយគឺសមាមាត្រទៅនឹងកម្លាំងបង្វិលជុំជាក់ស្តែងដែលត្រូវការ។ ដោយសារតែម៉ូទ័រ និងបន្ទះត្រួតពិនិត្យអេឡិចត្រូនិចរួមបញ្ចូលគ្នាដំណើរការត្រជាក់ជាង ម៉ូទ័រស្តេបភើរ VIC អាចសម្រេចបានកម្លាំងបង្វិលជុំកំពូលខ្ពស់ជាងបើប្រៀបធៀបទៅនឹងម៉ូទ័រសឺវ៉ូស។
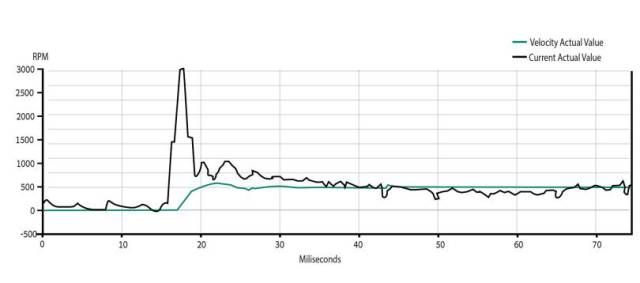
សូម្បីតែក្នុងល្បឿនលឿនក៏ដោយ ម៉ូទ័រ stepper VIC ត្រូវការចរន្តតិចជាង
ដោយសារការរីកចម្រើននៃបច្ចេកវិទ្យាបិទជិត ម៉ូទ័រ stepper អាចជ្រាបចូលទៅក្នុងកម្មវិធីដំណើរការខ្ពស់ និងល្បឿនលឿន ដែលពីមុនជាកម្មសិទ្ធិរបស់ម៉ូទ័រ servo ផ្តាច់មុខ។
ម៉ូទ័រ Stepper ជាមួយនឹងបច្ចេកវិទ្យារង្វិលជុំបិទជិត
ចុះបើគុណសម្បត្តិនៃបច្ចេកវិទ្យា servo រង្វិលជុំបិទជិតអាចត្រូវបានអនុវត្តទៅលើម៉ូទ័រ stepper?
តើយើងអាចសម្រេចបាននូវដំណើរការដែលអាចប្រៀបធៀបទៅនឹងម៉ូទ័រ servo ខណៈពេលដែលនៅតែដឹងពីគុណសម្បត្តិផ្នែកតម្លៃរបស់ម៉ូទ័រ stepper បានដែរឬទេ?
តាមរយៈការរួមបញ្ចូលគ្នានូវបច្ចេកវិទ្យាត្រួតពិនិត្យរង្វិលជុំបិទជិត ម៉ូទ័រ stepper នឹងក្លាយជាផលិតផលដ៏ទូលំទូលាយជាមួយនឹងគុណសម្បត្តិនៃម៉ូទ័រ servo និង stepper ក្នុងតម្លៃទាប។ ដោយសារតែម៉ូទ័រ stepper រង្វិលជុំបិទជិតផ្តល់នូវភាពប្រសើរឡើងគួរឱ្យកត់សម្គាល់នៅក្នុងដំណើរការ និងប្រសិទ្ធភាពថាមពល ពួកវាអាចជំនួសម៉ូទ័រ servo ដែលមានតម្លៃថ្លៃជាងនៅក្នុងកម្មវិធីស្តង់ដារខ្ពស់កាន់តែច្រើនឡើង។
ខាងក្រោមនេះគឺជាឧទាហរណ៍នៃម៉ូទ័រ stepper រួមបញ្ចូលគ្នា VIC ជាមួយនឹងការគ្រប់គ្រងរង្វិលជុំបិទជិតដែលបានបង្កប់ ដើម្បីពន្យល់ពីដំណើរការ និងគុណសម្បត្តិ និងគុណវិបត្តិនៃម៉ូទ័រ stepper ជាមួយនឹងបច្ចេកវិទ្យារង្វិលជុំបិទជិត។
តម្រូវការប្រតិបត្តិការដែលត្រូវគ្នាយ៉ាងច្បាស់លាស់
ដើម្បីធានាបាននូវកម្លាំងបង្វិលជុំគ្រប់គ្រាន់ដើម្បីយកឈ្នះលើការរំខាន និងជៀសវាងជំហានដែលបាត់បង់ ម៉ូទ័រ stepper រង្វិលជុំបើកចំហជាធម្មតាត្រូវធានាថាកម្លាំងបង្វិលជុំខ្ពស់ជាងតម្លៃដែលកម្មវិធីតម្រូវយ៉ាងហោចណាស់ 40%។ ម៉ូទ័រ stepper រង្វិលជុំបិទសព្វថ្ងៃនេះមិនមានបញ្ហានេះទេ។ នៅពេលដែលម៉ូទ័រ stepper ទាំងនេះជាប់គាំងដោយសារតែការផ្ទុកលើសទម្ងន់ ពួកវានឹងបន្តកាន់បន្ទុកដោយមិនបាត់បង់កម្លាំងបង្វិលជុំ។ ពួកវានឹងបន្តដំណើរការបន្ទាប់ពីលក្ខខណ្ឌផ្ទុកលើសទម្ងន់ត្រូវបានដកចេញ។ កម្លាំងបង្វិលជុំអតិបរមាអាចត្រូវបានធានានៅល្បឿនណាមួយដែលបានផ្តល់ឱ្យ ហើយឧបករណ៍ចាប់សញ្ញាទីតាំងធានាថាមិនមានការបាត់បង់ជំហានទេ។ ដូច្នេះម៉ូទ័រ stepper រង្វិលជុំបិទអាចត្រូវបានបញ្ជាក់ឱ្យត្រូវគ្នាយ៉ាងពិតប្រាកដទៅនឹងតម្រូវការកម្លាំងបង្វិលជុំនៃកម្មវិធីពាក់ព័ន្ធដោយមិនចាំបាច់មានរឹមបន្ថែម 40% ទេ។
ជាមួយនឹងម៉ូទ័រស្តេបភើររង្វិលបើកចំហ វាពិបាកក្នុងការបំពេញតាមតម្រូវការកម្លាំងបង្វិលជុំភ្លាមៗខ្ពស់ ដោយសារតែហានិភ័យនៃការបាត់បង់ជំហាន។ បើប្រៀបធៀបទៅនឹងម៉ូទ័រស្តេបភើរធម្មតា ម៉ូទ័រស្តេបភើររង្វិលបិទ VIC អាចសម្រេចបាននូវការបង្កើនល្បឿនលឿនខ្លាំង សំឡេងរំខានប្រតិបត្តិការទាប និងសំឡេងរោទ៍ទាប។ ពួកវាអាចដំណើរការក្នុងកម្រិតបញ្ជូនខ្ពស់ជាង និងសម្រេចបាននូវដំណើរការដ៏ល្អឥតខ្ចោះ។
គ្មានទូ
Toda រួមបញ្ចូលបន្ទះត្រួតពិនិត្យដ្រាយជាមួយម៉ូទ័រ ដោយកាត់បន្ថយចំនួនខ្សែភ្លើង និងធ្វើឱ្យដំណោះស្រាយអនុវត្តមានភាពសាមញ្ញ។ ជាមួយ toda អ្នកអាចសាងសង់ម៉ាស៊ីនដោយមិនចាំបាច់ប្រើទូ។
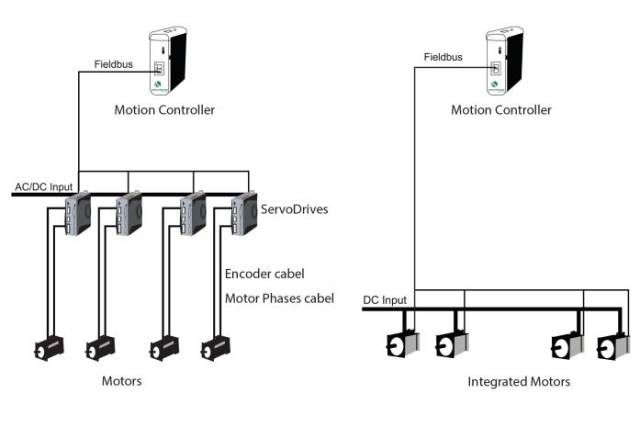
ការរួមបញ្ចូលគ្រឿងអេឡិចត្រូនិចជាមួយម៉ូទ័រ stepper កាត់បន្ថយភាពស្មុគស្មាញ
ជាមួយនឹងបច្ចេកវិទ្យារង្វិលជុំបិទជិត ម៉ូទ័រស្តេបភើររង្វិលជុំបិទជិតផ្តល់ជូនអ្នកប្រើប្រាស់នូវភាពត្រឹមត្រូវ និងប្រសិទ្ធភាពដ៏ល្អឥតខ្ចោះ ជាមួយនឹងដំណើរការរបស់ម៉ូទ័រស៊ែរវ៉ូ និងតម្លៃទាបរបស់ម៉ូទ័រស្តេបភើរ។ ម៉ូទ័រស្តេបភើរដែលមានតម្លៃទាបកំពុងជ្រៀតចូលបន្តិចម្តងៗនូវកម្មវិធីដែលបើមិនដូច្នោះទេនឹងត្រូវបានគ្របដណ្ដប់ដោយម៉ូទ័រស៊ែរវ៉ូដែលមានតម្លៃខ្ពស់។
ពេលវេលាបង្ហោះ៖ ថ្ងៃទី ១០ ខែមេសា ឆ្នាំ ២០២៣